How to use
Use the calculator on the left hand side to configure the settings of the trajectory you are looking for. The trajectory determination is done through the two following steps:
- Determining the planetary sequence that the trajectory must follow.
- Calculating the optimal trajectory using that sequence.
The nomenclature and the configuration of the calculator is further described in the following paragraphs.
Planetary sequence
The flyby sequence is the sequence of bodies encountered during the mission's
flight time. It starts with the departure body and ends with the destination body.
All intermediate bodies of the sequence are used for gravity assist.
Sequences are represented using the first characters (at least two) of each body's name. For example, a mission
going from Kerbin to Jool, with a first flyby of Eve followed by a flyby of Duna would be written:
Ke-Ev-Du-Jo.
Interplanetary legs
Each planet-to-planet transfer is called a leg, and consists of 3 steps:
- An unpowered flight from the exit of the last encountered body's sphere of influence.
- A deep space maneuver (DSM) used to correct the path to aim at the next body in the sequence.
- An unpowered flight until entering the next body's sphere of influence.
Sequence generation
The first step of the trajectory planning consists of generating a planetary sequence.
It will list a bunch of possible sequences considering a very simplified model of the solar system
and swing-bys, without any phasing.
Therefore there is no guarantee to have the most optimal sequence generated. But it tries to
provide feasible sequences.
Alternatively, it is possible to set a custom sequence if no interesting sequences is proposed by the generator, or to define custom routes. The input text must be a valid sequence representation. The trajectory calculation step will choose the custom sequence first if it is defined.
For the sequence generator, the following settings must be defined:
- The origin and destination body of the trajectory.
- Max swing-bys: the maximum number of swing bys allowed. Setting this value to 0 will only provide direct transfer sequences (e.g. Ke-Du).
- Max resonances: the maximum number of legs starting from and targeting the same body. For example the sequence Ke-Ev-Ev-Mo contains one resonance (Ev-Ev).
-
Max back legs: the maximum number of legs moving away from the destination body.
More precisely: if the destination body's orbit
has a larger radius than the origin body's orbit, then a leg going from a higher orbit to a lower orbit is considered
a back leg.
In the same way, if the destination body's orbit has a smaller radius than the origin body's orbit, then a leg going
from a lower orbit to a higher one is considered a back leg.
For example, in the sequence Ke-Ev-Ke-Mo, Ev-Ke is a back leg as it gets the spaceship on an orbit farther from Moho than the previous leg. - Max back spacing: the maximum gap between the exited and targeted body of a back leg. For example, setting this value to 0 would make the sequence Ke-Ev-Du-Mo forbidden, because Ev-Du is a back leg, and a planet with an orbit radius in between the ones of Eve and Duna exists (Kerbin), this back leg has a spacing of 1.
Trajectory calculation
Once the planetary sequence is selected, we must specify the departure and arrival conditions:
- Earliest and latest departure date: the time range in which the departure date must stay.
- Departure and destination altitude: the altitude of the parking orbit around the departure and destination body.
- Max duration: if checked, forces the trajectory solver to try not to exceed the specified maximum duration (in number of days). Note that it may give a trajectory that exceeds the limit if it cannot find shorter ones.
- No insertion burn: if checked, ignores circularization at the destination body and instead do a flyby at arrival.
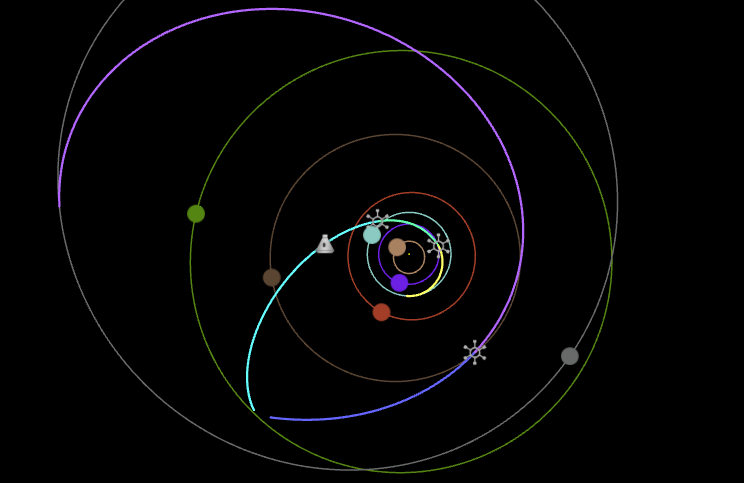
The trajectory search step will then try to find a possible optimal trajectory given the sequence and the departure/arrival conditions.
The resulting trajectory will be displayed in the interactive 3D window, alongside with the details of each maneuver (ejection, DSMs and circularization) and flybys' information.